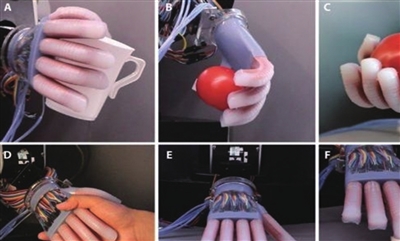
据《环球时报》报道,近日,新加坡科技设计大学仿生机器人与设计实验室研究人员开发了一种新型可重新配置的工作空间柔性机器人抓手,其可舀、拣和抓各种物品。它的全面自适应功能使其在物流和食品行业特别有用,这些行业正在依靠机器人自动化来满足日益增长的高效拣选和包装物品需求。